Abstract In order to meet the safety and rapid response requirements of electric windows, a power-window anti-pinch system based on LIN bus was designed by signal detection technology. The system detects the real-time position of the window glass through the Hall sensor, and selects the current change of the DC motor as the main indicator of the obstacle detection and judgment. The MM912F634 of Freescale is used as the window controller, and the platform is realized by the LIN bus connection. The experimental results show that the system can effectively detect obstacles and quickly perform anti-pinch control. The system is stable, reliable, fast, anti-interference ability and low cost, and has certain marketing value.
Keywords LIN; electric window; anti-pinch system; MM912F634
With the development of modern automobile technology, the electronic, intelligent and networked automobile has improved the comfort of the car, but at the same time put forward new requirements for the safety of the car. The electric window drives the window glass to automatically lift and lower by the motor. Many electric windows do not have the obstacles for detecting obstacles, which poses a certain safety hazard to the passengers, especially the younger children. The US Department of Transportation has issued FMVSS118 and strictly enforces regulations for cars and minivans. Although there is no relevant law in China, designing an anti-pinch system is a trend in the automotive industry without affecting comfort.
The LIN (Local Interconnect Network) bus is a regional interconnect network. It is a new low-speed serial bus with simple structure, flexible configuration and low cost. In this paper, a LIN-based electric window anti-pinch system is designed. Through the LIN bus, the window status and control parameters can be transmitted to the main control terminal for display, and the window anti-pinch network can be formed, which can be extended to other parts of the vehicle body. The real-time position of the window glass is detected by the Hall sensor, and the obstacle is judged according to the armature current change of the drive motor, and combined to realize the anti-pinch function. Freescale's MM912F634 is selected as the window controller, and the motor drive uses relays. The program has simple production process, good compatibility, low cost and strong resistance to external interference, solves the safety hazard and improves the safety performance of the vehicle.
1 Electric window anti-pinch system scheme Electric window anti-trap mainly refers to the window will stop by itself when the obstacle is reached to a certain extent during the rising of the glass. The anti-pinch area, the anti-pinch threshold force, and the anti-pinch execution action are three important indicators for realizing the anti-pinch function. According to the FMVSS118 standard, (1) the anti-pinch area is defined as an area from 4 to 200 mm from the top of the door and window. (2) The anti-pinch threshold force is 100 N. (3) When an obstacle is encountered, the window motor is reversed, and the window glass is stopped after a certain distance, waiting for further instructions from the user. The anti-pinch function is only turned on in the specified anti-pinch area, and accurate detection of the real-time position of the window glass is a top priority.
1.1 Window glass position detection The window lifting method is generally divided into wire type and mechanical arm type. The paper focuses on the arm type research. The rise and fall of the window are mainly realized by the window motor and the mechanical arm. The mechanical arm adopts a cross type. As the motor rotates, the intersecting angles of the two crossed arms will change, and the driving force of the window will change. The window glass will rise and fall with the positive and negative rotation of the motor. During the lifting process of the window glass, the lifting distance is proportional to the number of revolutions of the motor. When the rotor of the motor rotates, the Hall sensor generates a pulse signal. The MM912F634 counts the Hall pulse signal and obtains the reference reference value through multiple actual measurements. According to the reference value, the position of the current window glass can be calculated, and the reference reference value is transmitted to the main control unit through the LIN bus for storage, and the window controller can determine whether to start the anti-pinch according to the current area of ​​the window glass. Features. Due to the wear and tear of the window structure, the main control unit can correct each window by itself.
1.2 Current detection window motor current detection is a main means to detect the anti-pinch threshold force. The motor armature current will change according to the load change. The key of the current detection part is the judgment of the current threshold, and the accuracy of the current threshold is determined. The stability of the anti-pinch system, the current detection is often susceptible to interference from motor starting, window mechanical structure and other factors. When detecting current, it is necessary to amplify and filter the signal to ensure the accuracy of current detection. The signal acquisition process requires multiple tests to select the appropriate filtering method.
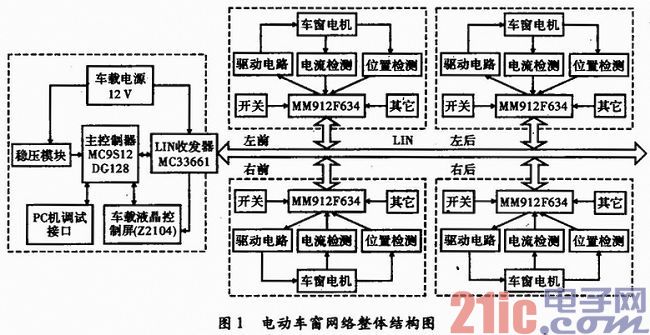
1.3 System Solution Determination The window anti-trap system mainly consists of 4 sub-units and one main control unit. The main control unit is composed of controller (MC9S12DG128) and liquid crystal control panel (Z2104). Each subunit includes a controller (MM912F634), a position detection module, a current detection module, and a motor drive module, which are connected to the main control unit through a LIN bus to form an in-vehicle LIN network, and the driver can perform each window through the liquid crystal control panel. control. The structure of each window is basically the same, and the position of the window and the threshold force are all referred to the FMVSS118 standard. The specific structure is shown in Figure 1.
This article refers to the address: http://
2 anti-pinch system hardware design
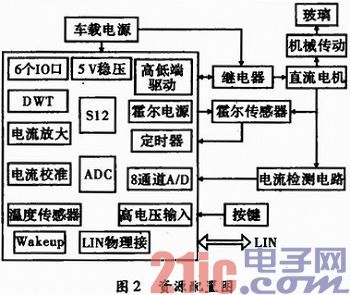
2.1 Controller design Two microprocessors are selected as the main controller and sub-controller respectively, the models are MC9S12DG128, MM912F634, both of which are Freesclae high-performance automotive electronic chips, especially MM912F634, built-in integrated voltage regulator , current amplifier, the LIN physical interface, high currents and high and low side driver, a temperature sensor, analog to digital conversion and other functional modules, fewer external components, help reduce costs, reduce hardware size, suitable for in-vehicle electronic equipment, resource configuration shown in Figure 2 Fig. The LCD module is the medium for the driver and the system to connect with each other. The model is Z2104. The screen is a resistive screen with a built-in VGA control board. It communicates with the controller through the serial port and operates at 12 V. The main controller may control the screen of the LCD screen directly read through the serial signal LCD touch screen, LCD screen touch signal converted into a LIN bus command, the sub-control means, at the same time, the window can also be fed back to the state the driver.
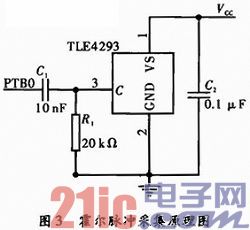
2.2 Window glass position detection hardware design Hall sensor is the main signal acquisition component of electric window system. Infineon TLE4923 Hall sensor, the output pulse signal of the shaping circuit without additional complexity output terminal (OUT) through a low-pass passive filter directly connected to the MM912F634 PTB0, PTB0 capture channel to a timer, The pulse signal of the Hall sensor can be directly counted, and the principle of Hall pulse acquisition is shown in FIG.
2.3 Current detection and motor drive hardware design The motor is an actuator that realizes the lifting and lowering of electric windows. Each window is equipped with a DC motor. The window can be lifted and lowered by mechanical transmission. The motor can be driven in two ways: The H-bridge circuit with MOSFET is high in cost but stable in performance; the other uses relay control, which is low in cost and simple in control. Designed for cost considerations, the relay control mode is selected. The model is Panasonic's ACT212, MM912F634 integrates high and low end drivers, which can directly control the ACT212. There is no need to connect the relay drive circuit. The specific principle structure is shown in Figure 4. Shown.
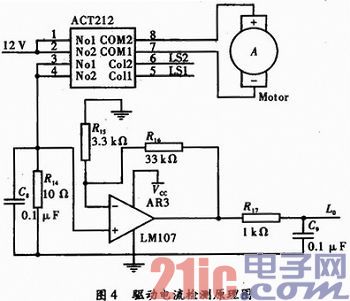
Related experiments have shown that the load torque of the motor shaft suddenly increases when the window glass is in the process of ascending. Therefore, the motor shaft load torque change rate is more sensitive to obstacles. However, in practical applications, the motor shaft load torque is not easy to measure. According to the characteristics of the DC motor, the change of the load torque causes a change in the armature current. The change of the armature current can indirectly reflect the operating state of the window, and the armature current is detected to determine the threshold force of the power window. The paper adopts the direct measurement method to connect a piece of constantan wire into the motor circuit. The constantan wire has a lower temperature coefficient of resistance, a wider temperature range, convenient processing, good welding performance, and can be adjusted according to actual debugging conditions. The value of the resistance is generally in the range of 0 to 15 mΩ. The basic principle of current detection is shown in Figure 4.
According to circuit theory ![]()
The motor armature current is converted into a voltage signal by the constantan wire, and is directly connected by filtering and amplification. MM912F634 A / D channel, MM912F634 A / D conversion accuracy of 10 bits, from the formula (1) can get A / D conversion results uAD (t) ![]()
It can be known from equation (2) that there is a linear relationship between the armature current of the DC motor and the A/D conversion result uAD(t). Therefore, there is a linear relationship between the motor shaft load torque and the A/D conversion result. The rate of change of the /D conversion result is reasonable as a judgment indicator for obstacle detection. The MM912F634 processes the A/D conversion data, determines the current window operation status, performs intelligent anti-clamping of the window, and performs bus communication with the main control unit to transmit the subsystem status at any time.
3 Anti-pinch system software design The electric window anti-pinch system mainly includes two parts: main control and sub-unit. To enhance the expansion of the main control, the main control system software design is based on the embedded real-time operating system, and the μC-OSII real-time operating system is transplanted. In the MC9S12DG128, each window anti-pinch is a task of the system, and other control of the body can also be added to the main control system in the form of tasks. Each subsystem is detected and controlled in an interrupted manner, which improves the real-time responsiveness of the system.
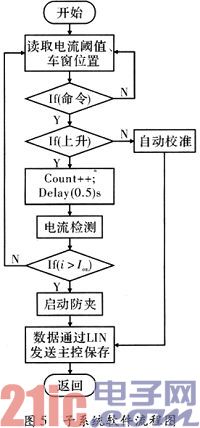
Since the MM91217634 does not have an integrated E2PROM, the threshold current Ion and the window position count value of the window need to be sent to the main control unit for storage through the LIN bus. When the power is turned on, the window position needs to be read through the LIN bus. , the master touch input, the control ACT212 raising and lowering the window, real-time armature current is collected during operation, is compared with a threshold current, to determine the location of the window at the same time is within the pinch zone, since the motor start When the armature's instantaneous current may be higher than the threshold current, a certain time delay is required when starting the detection current. If the current of the window is >Ion and the window is in the anti-pinch area, the control relay is protected against clamping. In the process of window lifting, the MM912F634 needs to count the Hall pulse signal and measure the position of the window in real time. After the anti-pinch process is finished, the sub-controller needs to feed the current window status parameter to the main controller through the LIN bus. And display, the software flow chart of the subsystem is shown in Figure 5.
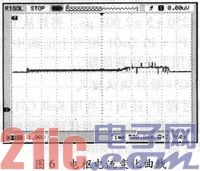
4 Experimental test After the whole system design is completed, the system calibration is first performed, the parameters of the system are tested, and then the overall anti-pinch function is tested. Figure 6 shows the voltage change curve of the armature current during the rising process of the window. When starting, the armature current will increase instantaneously. After a period of time, the window encounters obstacles and armature. The current has exceeded the threshold current for a period of time. When the window enters the anti-pinch area, the system activates the anti-pinch function to close the window, and the current is zero. After repeated testing, the system can accurately achieve the anti-pinch function.
5 Conclusion The design of the electric window anti-pinch system is described. Through the Hall sensor and current detection, the intelligent anti-pinch function of the electric window is realized, and it is connected to the LIN network. The monitoring and control is controlled by the main control liquid crystal, and the system is improved. Integration, reduced cost and easy driver control. Through safety experiments, the system is stable and can accurately achieve the anti-pinch function.
Established in 1956, during the China first five-year-plan, Henan Xintaihang Power Source Co., Ltd. (Factory No.755) was the first R&D and manufacturing enterprise in China in the field of alkaline storage batteries and modular power system and it was also the military factory which owned the most varieties rechargeable batteries in domestic. Taihang was located in national Chemistry and Physicals Power Source Industrial Park, Xinxiang City, Henan, China.
Extra High Dishcharge Rate Nickel Cadmium Battery, KPX10 ~ KPX240, Max. discharge current <10C
The nickel–cadmium battery (NiCd battery or NiCad battery) is a type of rechargeable battery using nickel oxide hydroxide and metallic cadmium as electrodes. The abbreviation NiCd is derived from the chemical symbols of nickel (Ni) and cadmium (Cd).
Sintered Type Nickel Cadmium Battery
Nickel Cadmium Battery,Starting Battery,Nickel Cadmium Battery Aircraft,Nickel Cadmium Battery For Metro
Henan Xintaihang Power Source Co.,Ltd , https://www.taihangbattery.com